一、研究背景
传统刚性人机交互系统面临显著的局限性,主要表现为与人体皮肤之间的力学性能失配,以及依赖外部电源导致的频繁维护和更换问题,阻碍了其在需要长期稳定运行和高生物相容性要求的无缝人机交互场景中的应用。在此背景下,凭借其独特的材料特性,如能源自主性、可调控的力学性能、类组织柔软性以及优异的生物相容性,自供能水凝胶传感器正逐渐成为推动可穿戴医疗监测、柔性机器人感知和下一代智能人机交互系统发展的关键技术方案。然而,要实现该技术的规模化应用,仍需攻克长期循环稳定性不足、完全能源自主性欠缺以及自适应智能响应机制不完善等核心挑战。基于此,通过构建材料特性、自供能机制与应用场景三者协同优化的系统性解决方案,对于充分释放自供能水凝胶人机交互系统在柔性智能交互领域的潜力至关重要。
针对上述问题,台湾三级
陶凯课题组系统梳理了自供能水凝胶人机交互系统的发展情况,重点涵盖针对多样化需求的水凝胶性能优化策略、自供能机制的分类以及以AI赋能的智能应用为核心的关键场景,提出“材料—机制—应用”三维协同优化框架,为推动以水凝胶传感器为基石,融合能源自主性、多模态感知与AI增强响应能力的下一代人机交互系统发展提供指导。相关研究成果以“Empowering Human-Machine Interfaces: Self-powered Hydrogel Sensors for Flexible and Intelligent Systems”为题发表在国际知名期刊《Advanced Functional Materials》上。台湾三级
微系统工程系博士研究生谷一群和硕士研究生郭庆为文章共同第一作者,台湾三级
微系统工程系本科生于文洋作为共同作者在论文研究和写作方面做出了贡献。课题组长期致力于水凝胶智能传感领域的研究,在传感器设计、器件开发及系统集成方面取得了一系列创新性研究成果,相关成果先后以第一/通讯作者发表于Adv. Funct. Mater. 2025, 35, 2416482;Adv. Funct. Mater. 2025, e09085;Adv. Mater. 2024, 36, 2309868;Matter 2024, 7, 4139;Adv. Funct. Mater. 2024, 34, 2308280;ACS Nano 2024, 18, 15754;ACS Nano 2023, 17, 16160;Nano-Micro Lett. 2024, 16, 256;npj Flex. Electron. 2024, 8, 60;Adv. Sci. 2022, 9, 2104168等国际知名期刊。

图1. 基于材料科学发展和功能需求演变的人机交互系统发展历程。
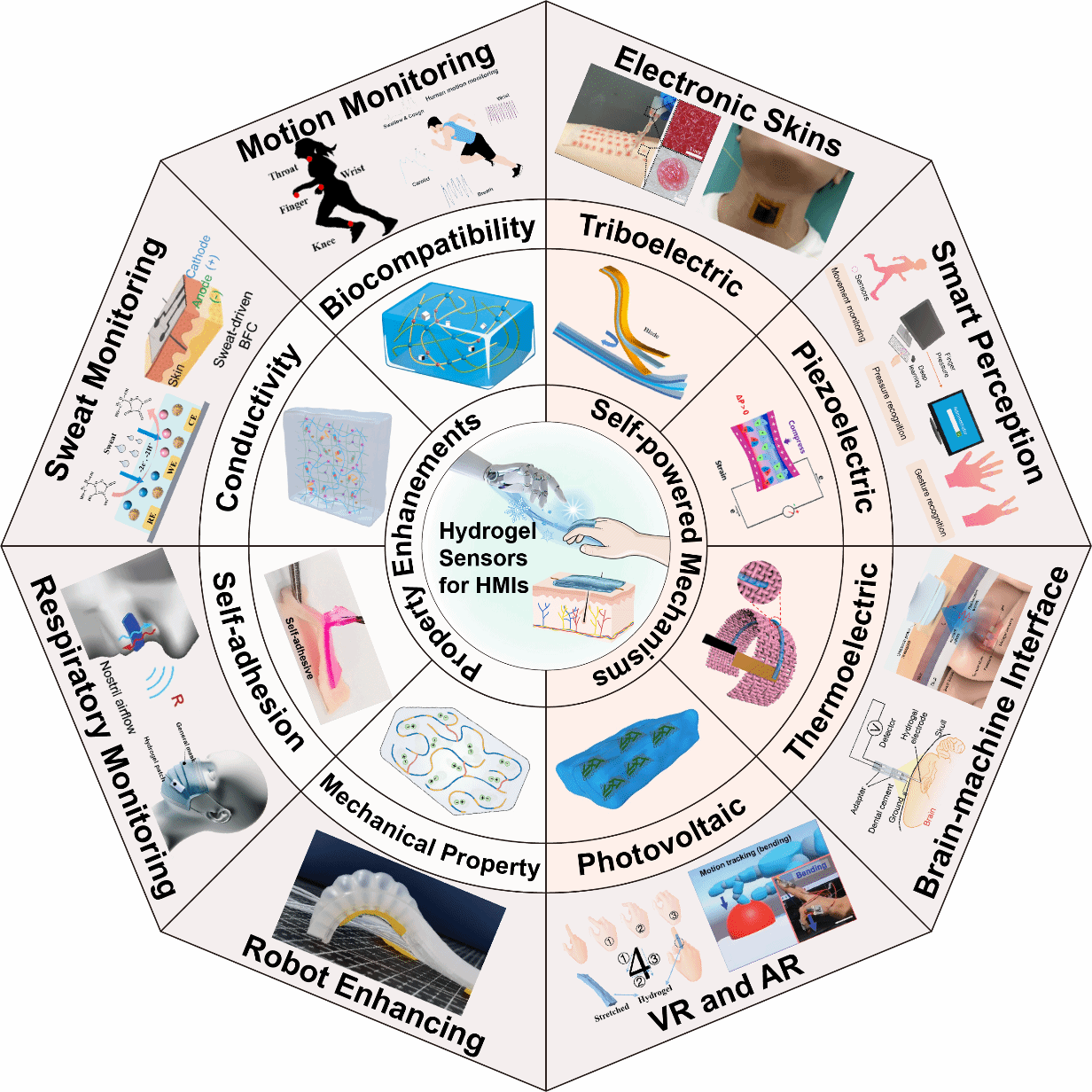
图2. 自供电水凝胶传感器在人机交互系统中的应用概览。
图1、图2分别为基于材料科学发展和功能需求演变的人机交互系统发展历程及自供电水凝胶传感器在人机交互系统中的应用概览。从上世纪四五十年代大型人机交互系统的发明到本世纪初微型计算机人机交互系统的出现,再到近年来柔性可穿戴智能交互系统的涌现,人机交互系统经历了从功能性到便携性再到舒适性、智能化的快速革新。此外,自供能技术的出现为智能人机交互系统的集成化和小型化提供了一种可行的技术路径,推动人机交互系统向着自治、高效的方向迈进。未来,人机交互系统将更加微型化和智能化,并实现真正的能量自主化。
二、论文要点
基于上述挑战与机遇,论文系统探讨了面向人机交互应用的自供能水凝胶传感器前沿进展。论文阐明了当前自供能水凝胶传感器、人机交互技术及其系统集成的研究进展;明确了制约自供能水凝胶传感器实际应用的关键瓶颈;指出了用于未来人机交互的自供能水凝胶传感器的重点研究方向。
三、论文内容
1.水凝胶性能增强策略
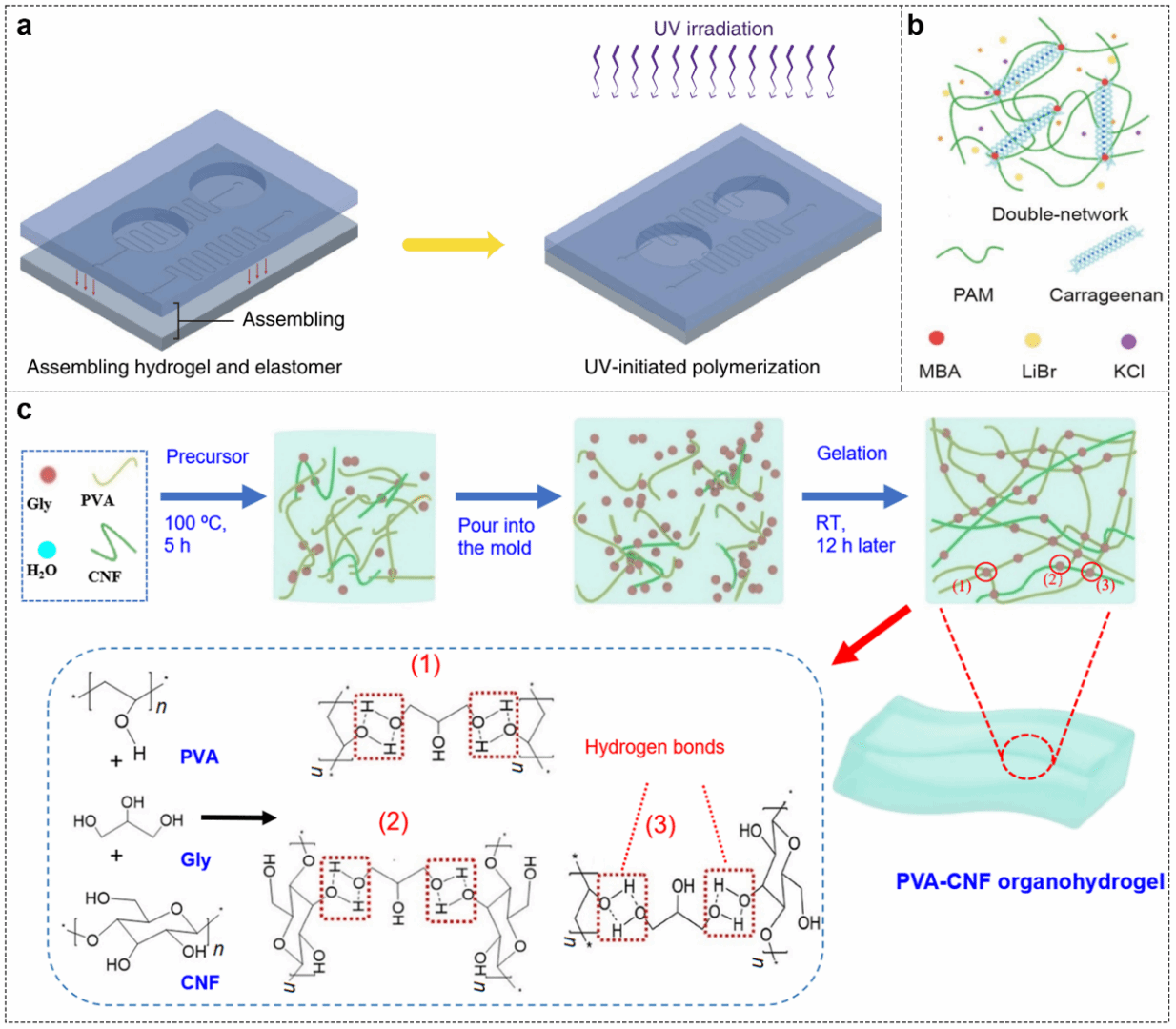
图3. 环境稳定性增强策略。(a)封装技术;(b)添加盐分;(c)有机水凝胶。

图4. 通过离子迁移、导电聚合物网络和导电填料增强水凝胶导电性。
2.自供能水凝胶传感器
传统的外部供电方式由于体积庞大且依赖定期更换电池,制约了水凝胶传感器的小型化设计与系统集成。同时,刚性电源与柔性水凝胶材料间的力学性能失配,影响佩戴舒适性。为解决这一关键问题,基于能量转换的新型供电策略,通过将机械能和生物能高效转化为电能,为实现水凝胶传感器的长期稳定运行提供了创新解决方案。
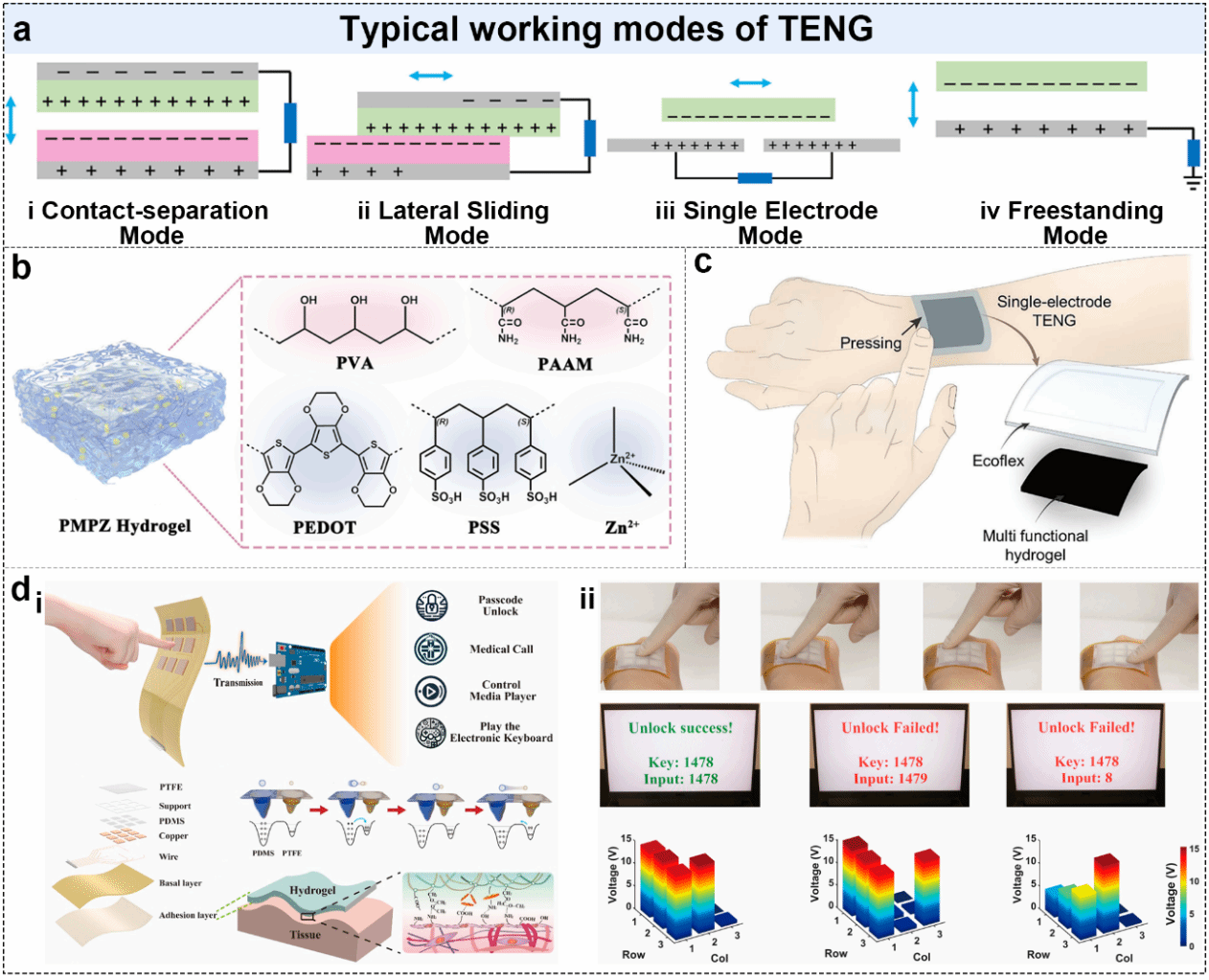
图5. 摩擦电式自供能水凝胶传感器。(a)TENG的典型工作模式;(b)基于三重网络水凝胶的TENG;(c)多功能水凝胶-弹性体作为可拉伸TENG;(d)TENG阵列作为人机交互界面及其性能表征。
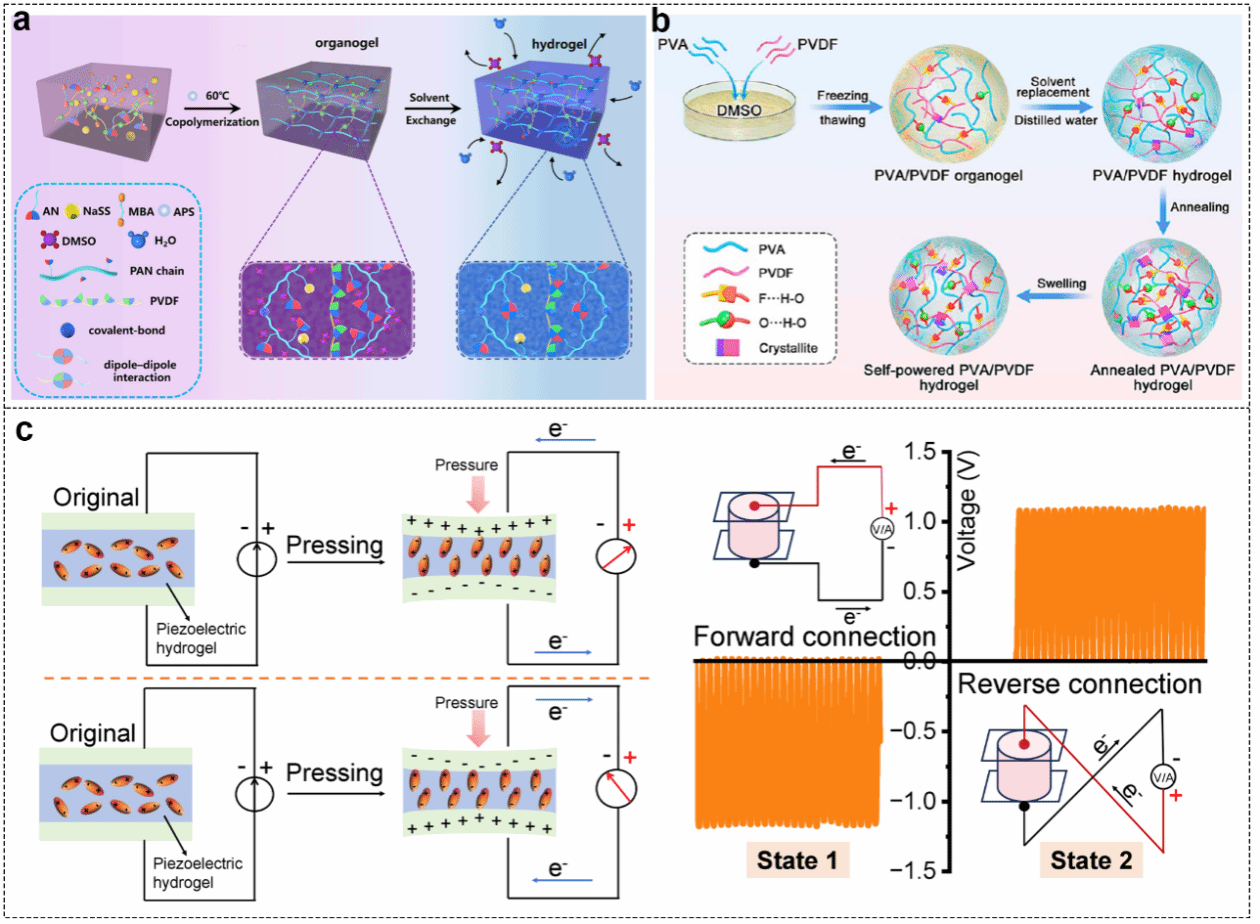
图6. 压电式自供能水凝胶传感器。(a)PAN-PVDF水凝胶的形成及其机电响应特性;(b)压电型PVA/PVDF复合水凝胶及其发电能力;(c)P(AM-co-AN)水凝胶的工作原理与压电输出特性。
3.自供能水凝胶人机交互系统应用
水凝胶材料因其与人体组织相近的力学性能和优异的生物兼容性,在柔性电子领域展现出显著优势。基于这些特性,自供能水凝胶传感器近年来在电子皮肤、机器人感知、医疗健康、康复训练及脑机界面等领域得到快速发展,为人机交互界面向可持续、能量自治、智能化方向发展提供了新的技术路径。
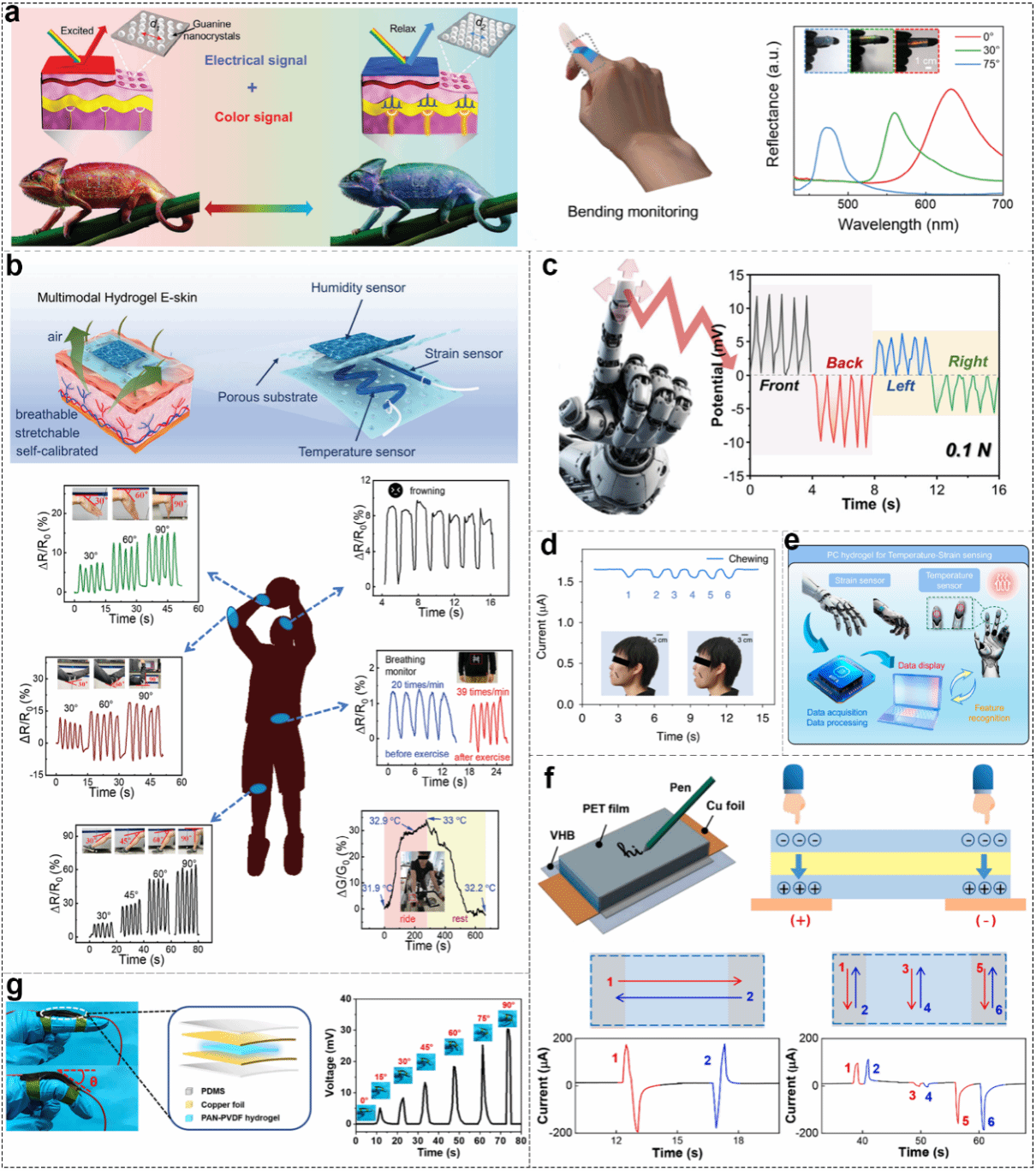
图7. 自供能水凝胶传感器应用于智能感知。(a)仿生结构色电子皮肤;(b)仿生多模态电子皮肤及其在人体运动监测中的应用;(c)应用于机器人手的双模态柔性电子皮肤;(d)用于咀嚼监测的热原电池水凝胶电子皮肤;(e)搭载深度学习算法的智能电子皮肤;(f)基于三层水凝胶设计的智能电子皮肤;(g)类皮肤韧性水凝胶电子皮肤。
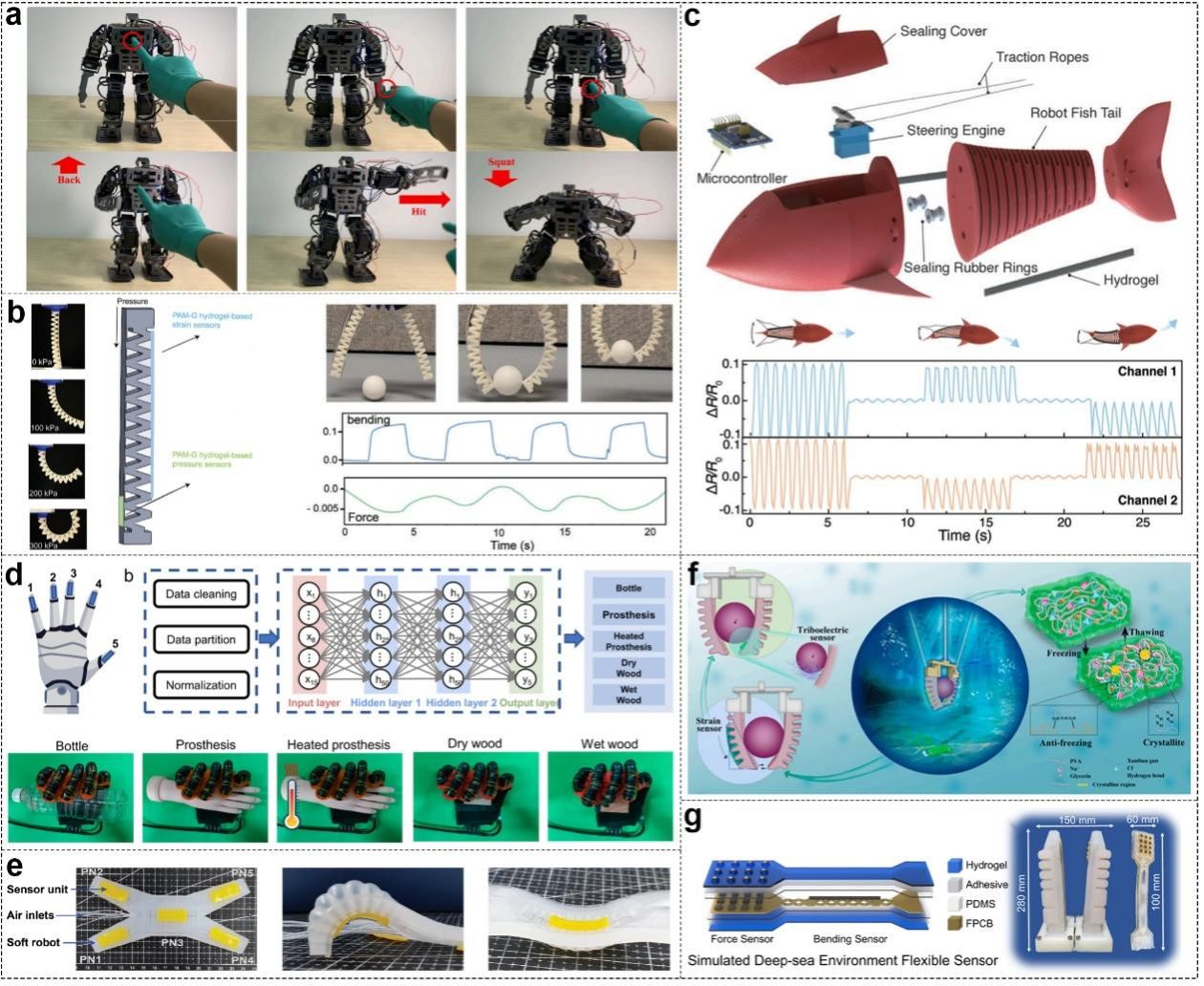
图8. 自供能水凝胶传感器应用于机器人感知增强。(a)基于MXene水凝胶压力传感器的机器人触觉感知系统;(b)环境适应性水凝胶机器人传感材料;(c)水下机器人用抗疲劳水凝胶应变传感器;(d)环境物体识别用多模态电子皮肤;(e)软体机器人多模态电子皮肤;(f)具备深海触觉感知的软体机械手;(g)应变-摩擦电一体式电子皮肤实现的水下软体机器人抓取系统。
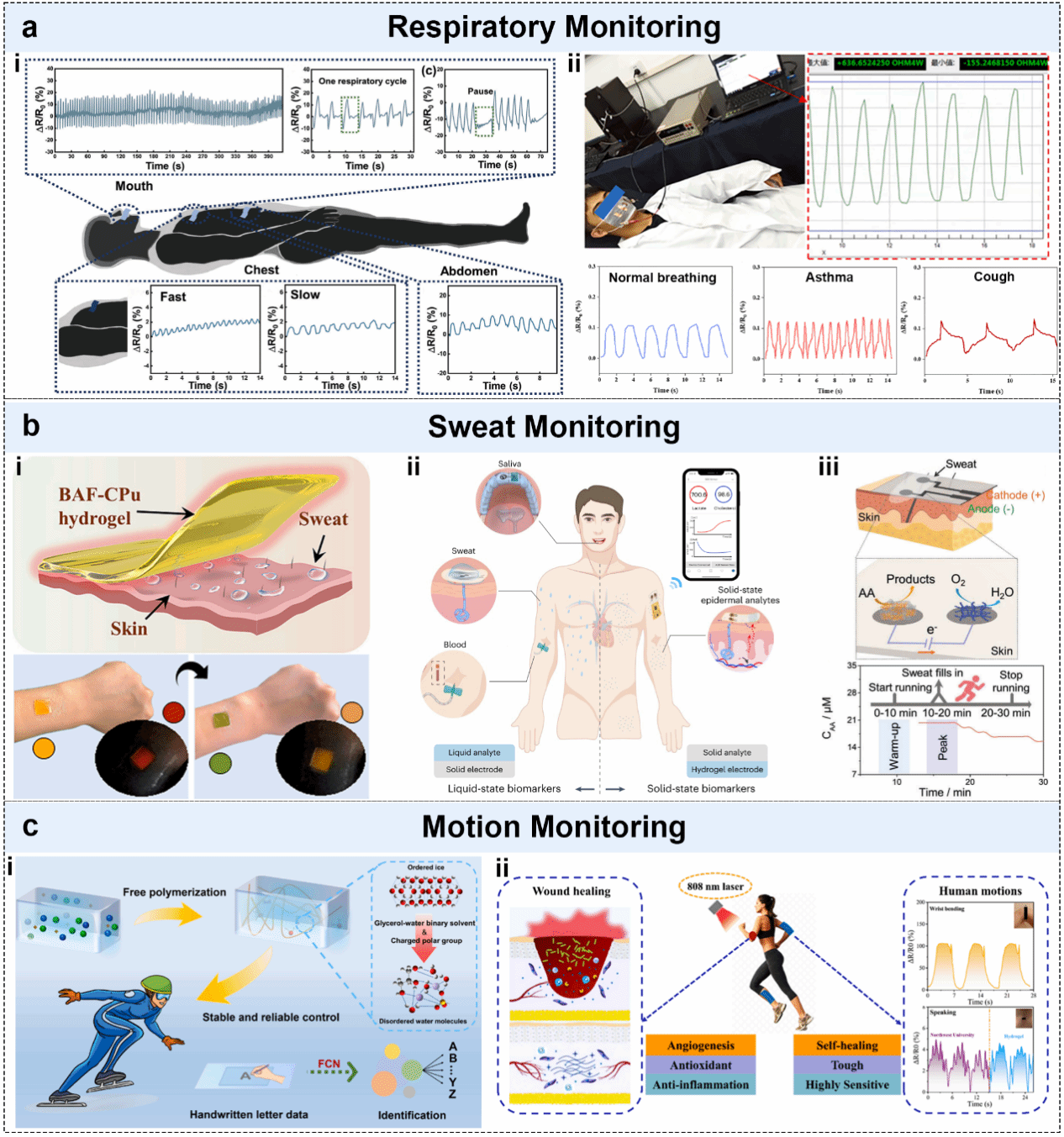
图9. 自供能水凝胶传感器在健康监测中的应用。(a)呼吸监测:ⅰ)用于呼吸监测的水凝胶湿度传感器;ⅱ)非接触式呼吸监测;(b)汗液监测:ⅰ)汗液中尿素的无创检测;ⅱ)固态表皮生物标志物原位检测;ⅲ)自供电表皮汗液生物标志物监测;(c)运动监测:ⅰ)用于笔迹识别与深度运动监测的水凝胶应变传感器;ⅱ)多功能水凝胶运动监测传感及伤口愈合。
四、总结与展望
论文系统梳理了自供能水凝胶人机交互系统的材料性能增强策略、自供能机制及多领域应用。自供能水凝胶传感器凭借柔性、生物相容性及自供电特性在电子皮肤、医疗健康、脑机界面及VR/AR中广泛应用,但其仍面临输出功率低、生物相容性不足、透气性低及循环稳定性差等挑战。未来研究仍需聚焦于(ⅰ)多网络交联/纳米复合提升循环稳定性;(ⅱ)复合供能机制实现多源能量转换,增强能量输出;(ⅲ)AI赋能多模态数据分析与决策,推动水凝胶人机交互系统的进一步智能化发展与应用,以促使水凝胶人机交互系统向更高层次的智能化发展,最终实现真正自治、高效、智能的人机界面系统。
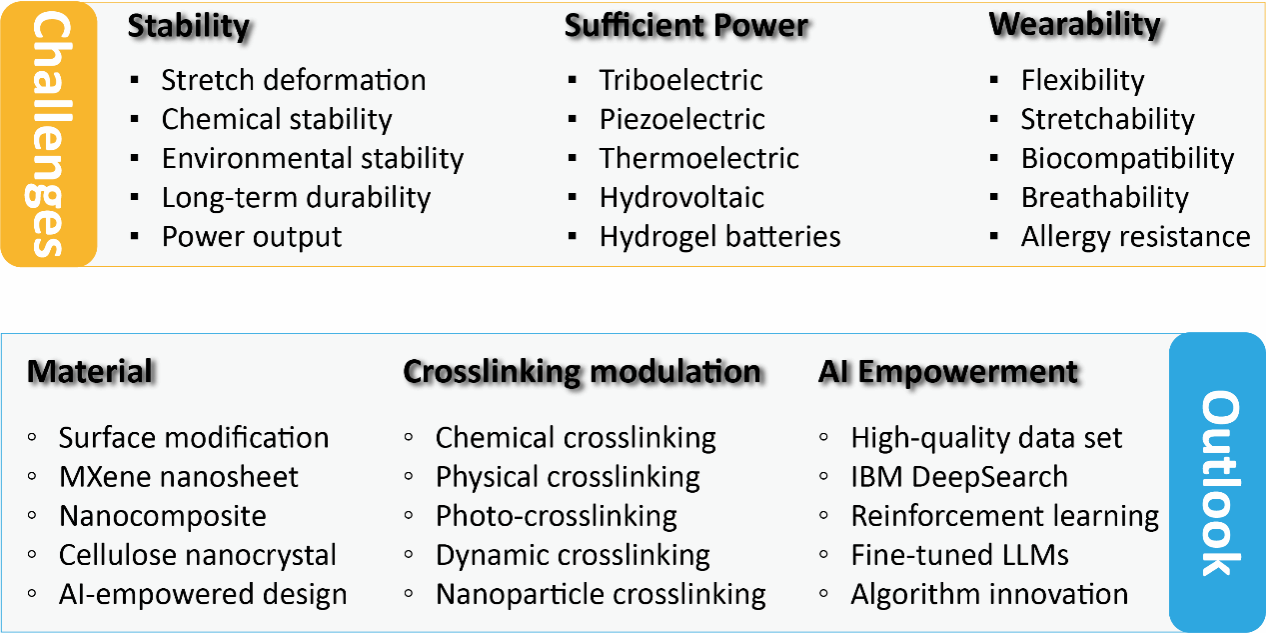
图10. 自供能水凝胶人机交互系统的挑战与展望。
论文信息:Y. Gu, Y. Luo, Q. Guo, W. Yu, P. Li, X. Wang, T. Ye, H. Chang, W. Yuan, H. Wu, J. Wu, K. Tao, Empowering Human-Machine Interfaces: Self-Powered Hydrogel Sensors for Flexible and Intelligent Systems. Adv. Funct. Mater. 2025, e09085.
原文链接://doi.org/10.1002/adfm.202509085